Оптимизирање на перформансите со MPU-6050: Поставување, калибрација и апликации
2024-04-25
9203
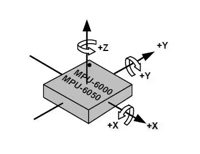
MPU-6050 е прва интегрирана компонента за обработка на движење со 6 оски, која интегрира 3-оски гироскоп, акцелерометар со 3 оски и скалабилен процесор за дигитално движење (DMP).Целта на користењето на истиот е да се добие агол на наклон на предметот што треба да се измери (како што е квадкоптер, автомобил за балансирање) на оските X, Y и Z, односно аголот на теренот, аголот на ролна и аголот на вилицата.Ги читаме шесте податоци за MPU-6050 (вредност на рекламирање со три-оски за забрзување и вредност на And And And Ang angular) преку интерфејсот I2C.По обработката на фузијата на држење, може да се пресметаат аглите на теренот, ролната и вилицата.Како насока за насока за мерење на вредностите, дефиницијата за насоката на координатната на сензорот е како што е прикажано на сликата подолу, што го следи принципот на десниот координатен систем (т.е. десниот палец укажува на позитивната насока на x-Оска, показалецот укажува на позитивната насока на y-оската, а средниот прст укажува на позитивната насока на Z-оската).
Каталог
Со својот посветен I2C сензорски автобус, MPU-6050 е во состојба да добие влез директно од надворешен компас со 3 оски, обезбедувајќи целосен излез од 9-оска движење.Го елиминира проблемот со несовпаѓање помеѓу комбинираниот временски распоред и временската рамка на акцелераторот и значително го намалува просторот за пакување во споредба со мулти-компонентите решенија.Кога е поврзан со магнетометар со три оски, MPU-60X0 е способен да обезбеди целосен излез на фузија на движење од 9 оски на главната порта I2C или SPI (Забележете дека SPI-портата е достапна само на MPU-6000).
Алтернативи и еквиваленти
- MPU-3300
- MPU-6000
- MPU-6500
Производител на MPU-6050
Производителот на MPU-6050 е TDK.Откако двајцата основачи на ТДК, д -р Јогоро Като и Таки Тапи, го измислиле Ферит во Токио, тие го основале Токио Денкикагаку Когио К.К.Во 1935 година. Како глобален бренд за електронска индустрија, ТДК отсекогаш одржувала доминантна позиција во областа на електронските суровини и електронските компоненти.TDK's comprehensive and innovation-driven product portfolio covers passive components such as ceramic capacitors, aluminum electrolytic capacitors, film capacitors, magnetic products, high-frequency components, piezoelectric and protection devices, as well as sensors and sensor systems (such as temperature and pressure,Магнетски и MEMS сензори), итн. Покрај тоа, TDK исто така обезбедува напојување и енергетски уреди, магнетни глави и други производи.Неговите брендови на производи вклучуваат TDK, EPCOS, Invensense, Micronas, Tronics и TDK-Lambda.
Внатрешен блок дијаграм на MPU-6050
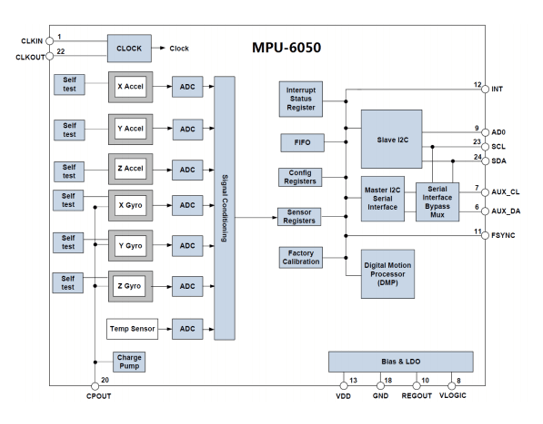
Меѓу нив, SCL и SDA се IIC интерфејсите поврзани со MCU, а MCU го контролира MPU-6050 преку овој IIC интерфејс.Исто така, постои IIC интерфејс, имено AUX_CL и AUX_DA.Овој интерфејс може да се користи за поврзување на надворешни робови уреди, како што се магнетни сензори, за да се формира сензор со девет оски.Vlogic е напон на портата IO.Овој пин може да поддржи минимум 1,8V.Обично го поврзуваме директно со VDD.AD0 е пинот за контрола на адресата на интерфејсот SLABE IIC (поврзан со MCU).Овој пин го контролира најнискиот дел од адресата на IIC.Ако е поврзана со GND, IIC адресата на MPU-6050 е 0x68;Ако е поврзано со VDD, тоа е 0x69.Забележете дека адресата овде не вклучува најнизок пренесување на податоци (најнискиот бит се користи за претставување на операции за читање и пишување).На MwbalancedStc15, AD0 е поврзан со GND, така што IIC адресата на MPU-6050 е 0x68 (со исклучок на најнискиот бит).
Иницијализирајте го IIC интерфејсот
MPU-6050 користи IIC за да комуницира со STC15, така што треба прво да ги иницијализираме линиите за податоци SDA и SCL поврзани со MPU-6050.
Ресетирајте MPU-6050
Овој чекор ги враќа сите регистри во MPU-6050 на нивните стандардни вредности, што се постигнува со пишување 1 до BIT7 од Регистарот за управување со електрична енергија 1 (0x6b).По ресетирање, Регистарот за управување со електрична енергија 1 ќе биде вратен на стандардната вредност (0x40), а овој регистар мора последователно да биде поставен на 0x00 за да го разбуди MPU-6050 и да го стави во нормална работна состојба.
Поставете го целиот опсег на сензорот за аголна брзина (GYRO) и сензорот за забрзување
Во овој чекор, поставивме целосен опсег (FSR) на двата сензори преку регистарот за конфигурација на гироскопот (0x1b) и регистарот за конфигурација на сензорот за забрзување (0x1c), соодветно.Обично, го поставивме целиот опсег на жироскопот на ± 2000dps и целосниот опсег на акцелерометарот на ± 2G.
Поставете други параметри
Еве, исто така, треба да ги конфигурираме следниве параметри: Исклучете ги прекините, оневозможете го интерфејсот AUX I2C, да го оневозможите FIFO, да ја поставите стапката на земање примероци на жироскоп и да го конфигурирате дигиталниот филтер со низок премин (DLPF).Бидејќи не користиме прекини за да ги прочитаме податоците во ова поглавје, функцијата за прекинување треба да се исклучи.Во исто време, бидејќи не го користиме интерфејсот AUX I2C за да ги поврземе другите надворешни сензори, исто така треба да го затвориме овој интерфејс.Овие функции можат да се контролираат преку Регистарот за вклучување на прекинување (0x38) и регистар за контрола на корисници (0x6a).MPU-6050 може да користи FIFO за да ги чува податоците за сензорите, но ние не ги користевме во ова поглавје, така што сите канали на FIFO треба да бидат затворени.Ова може да се контролира преку Регистарот за овозможување FIFO (0x23).Стандардно, вредноста на овој регистар е 0 (т.е. FIFO е оневозможена), така што можеме да ја користиме стандардната вредност директно.Стапката на земање мостри на жироскопот е контролирана од регистарот на делител на стапката на земање мостри (0x19).Нормално, ја поставивме оваа стапка на земање мостри на 50. Конфигурацијата на дигиталниот филтер со низок премин (DLPF) е завршена преку Регистарот за конфигурација (0x1a).Општо земено, ние ќе поставиме DLPF на половина од широчината на опсегот за да ја балансираме точноста на податоците и брзината на одговор.
Конфигурирајте го изворот на часовникот на системот и овозможете го сензорот за аголна брзина и сензорот за забрзување
Поставувањето на изворот на часовникот на системот зависи од Регистарот за управување со електрична енергија 1 (0x6b), каде што најниските три бита од овој регистар го одредуваат изборот на изворот на часовникот.Стандардно, овие три бита се поставени на 0, што значи дека системот го користи внатрешниот осцилатор од 8MHz RC како извор на часовник.Како и да е, за да ја подобриме точноста на часовникот, честопати го поставуваме на 1 и го избираме х-оската гироскоп PLL како извор на часовникот.Покрај тоа, овозможувањето на сензорот за аголна брзина и сензорот за забрзување е исто така важен чекор во процесот на иницијализација.Двете операции се спроведуваат преку Регистарот за управување со електрична енергија 2 (0x6C).Едноставно поставете го соодветниот бит на 0 за да го активирате соодветниот сензор.По завршувањето на горенаведените чекори, MPU-6050 може да внесе нормален статус на работа.Оние регистри што не се специјално поставени, ќе ги усвојат стандардните вредности претходно поставени од системот.
Како работи MPU-6050?
Gyro сензор
Сензорот е опремен со жиро внатре, што секогаш ќе остане паралелно со почетната насока заради жироскопскиот ефект.Затоа, можеме да ги пресметаме насоката и аголот на ротација со откривање на отстапувањето на гиро од почетната насока.
Сензор за акцелерометар
Сензор за акцелерометар е уред кој може да го мери забрзувањето и работи врз основа на принципот на пиезоелектричен ефект.За време на забрзувањето, сензорот ја мери инерцијалната сила што се применува на масовниот блок и потоа ја пресметува вредноста на забрзувањето користејќи го вториот закон на tonутн.
Процесор за дигитално движење (ДМП)
DMP е модул за обработка на податоци во чипот MPU6050 кој има вграден алгоритам за филтрирање на Калман за стекнување на податоци од сензорите за жироскоп и акцелерометар и обработка на излезните кватерни.Оваа одлика во голема мерка го намалува обемот на работа на периферниот микропроцесор и го избегнува мачниот процес на филтрирање и фузија на податоци.
Белешки:
Кватерниони: Кватерниите се едноставни суперкомплексни броеви.Комплексните броеви се составени од вистински броеви плус имагинарната единица I, каде што i^2 = -1.
Каде се користи MPU-6050?
- Играчки
- слушалка и преносни игри
- Контролори за игри базирани на движење
- Blurfree ™ технологија (за видео/сè уште стабилизација на сликата)
- AirSign ™ технологија (за безбедност/автентикација)
- Инстантгеста ™ IG ™ Признавање на гестот
- Носени сензори за здравје, фитнес и спорт
- Рамка за игри и апликации со можност за движење
- MotionCommand ™ Технологија (за кратки кратки на гест)
- Услуги засновани на локација, точки на интерес и мртво сметање
- 3Д далечински управувачи за Интернет поврзани DTV и поставени врвни кутии, 3Д глувци
- TouchAnywhere ™ Технологија (за контрола/навигација на апликација за UI на UI)
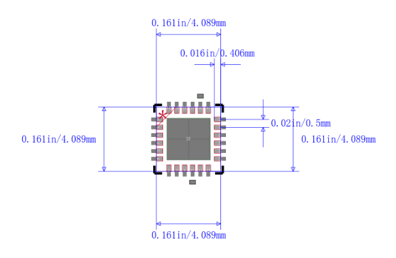
Пакет на MPU-6050
Како да се намали бучавата на MPU-6050?
Можеме да ги земеме следниве начини да го намалиме бучавата на MPU-6050.
Користете калибрирани сензори
Калибрирањето на акцелерометарот и жироскопот на MPU-6050 може да ја елиминира пристрасноста и грешката на самите сензори, со што ќе се намали ефектот на бучавата.Процесот на калибрација обично се состои од две фази: статичка калибрација и калибрација на движење.
Процес на филтрирање на хардвер
Додавањето кондензатори на филтерот во електричната линија на MPU-6050 може да го намали влијанието на бучавата за напојување врз сензорот.Во меѓувреме, за време на распоредот на ПЦБ, треба да се обидеме да го задржиме MPU-6050 подалеку од потенцијалните извори на мешање, како што се сигнални линии со висока фреквенција и компоненти со голема моќност.
Обработка на филтрирање на софтвер
По собирањето на сурови податоци од MPU-6050, можеме да додадеме врска за филтрирање на софтвер за да ги пред-процесираат почетните податоци за да се елиминира мешање предизвикано од бучава.Најчесто користените методи за филтрирање на софтвер вклучуваат средно филтрирање, средно филтрирање, филтрирање на Калман и така натаму.
Користете внатрешен филтер со низок премин
MPU-6050 има внатрешен интегриран дигитален филтер со низок премин, кој може да се користи за да се намали бучавата со висока фреквенција со поставување на фреквенцијата на прекинување.Поточно, можеме да ја поставиме фреквенцијата на пресекот на дигиталниот филтер со модифицирање на конфигурациониот регистар на MPU-6050 за да се елиминира бучавата со висока фреквенција предизвикана од земање примероци од А/Д.
Пресметка на траекторијата за движење на движење MPU-6050
MPU-6050 е сензор за акцелерометар и жироскоп со шест оски што може да се искористи за мерење на движењето и ставот на предметите.Пресметката на траекторијата на движење заснована на MPU-6050 може да се реализира со следниве чекори:
Првиот чекор е да ги прочитате податоците за сензорот.Треба да ги прочитаме податоците за акцелерометарот и жироскопот од сензорите MPU-6050 користејќи соодветни возачи и функции на библиотеката.Овие податоци обично се појавуваат во дигитален формат, така што е потребна одредена работа за конверзија и калибрација за да се претворат во вистински мерења во физичките единици.
Вториот чекор е да се пресмета забрзувањето.Прво, треба да ги процесираме податоците од акцелерометарот за да го извлечеме забрзувањето на предметот во секоја оска.Последователно, за да ја пресметаме брзината и поместувањето на предметот во секоја оска, треба да ги интегрираме податоците за забрзување.Техниките за нумеричка интеграција, како што е методот на Еулер или методот Лунџер-Кута, честопати се користат во овој процес за да се обезбеди точноста на пресметките за поместување.
Третиот чекор е да се пресмета аголната брзина.Користејќи ги податоците за жироскоп, може да се пресмета аголната брзина на предметот во секоја оска.Повторно, овие податоци треба да бидат калибрирани и конвертирани за да се добие аголна брзина во реалните физички единици.
Четвртиот чекор е да се пресмета ротацијата.Со интегрирање на податоците за аголна брзина, може да се пресмета аголот на ротација на предметот во секоја оска.Ова може да се направи со употреба на нумерички техники за интеграција, како што е методот на Еулер или методот Longe-Kutta за да се пресмета аголот.
Петтиот чекор е да се спојат податоците.Ние ги комбинираме податоците од акцелерометри и гироскопи за да добиеме целосен став и информации за позицијата на предметот.Ова може да се направи со употреба на алгоритми како што се решавач на став заснован на кватернион или решавање на агол на Еулер.
Шестиот чекор е да се визуелизираат резултатите.Ние ја претвораме пресметаната траекторија на движење на објектот во збир на точки во 3Д координатен систем и ја прикажуваме со помош на соодветни алатки за визуелизација за поинтуитивно разбирање на траекторијата на движењето на предметот и промените во ставот.
Често поставувани прашања [ЧПП]
1. Колку е точен MPU6050?
Стекнатите резултати покажаа доволна точност од помалку од 1 % и сигурност, обезбедувајќи соодветно димензионирање на лифтот и високите стандарди на индустријата за лифт.
2. Како да ги прочитате податоците од MPU6050?
За да ги прочитате внатрешните регистри на MPU6050, мајсторот испраќа почетна состојба, проследена со адресата на робови I2C и бит за пишување, а потоа и адресата на регистарот што ќе се прочита.
3. Каде се користи MPU6050?
Во уредите за следење на здравјето што се носат, уреди за следење на фитнес.Кај беспилотни летала и квадкоптери, MPU6050 се користи за контрола на позицијата.Се користи во контролирање на роботската рака.Уреди за контрола на гест на рацете.
4. Дали MPU6050 е IMU?
Блокот на сензорот MPU6050 IMU чита податоци од сензорот MPU-6050 што е поврзан со хардверот.Блок излегува забрзување, аголна стапка и температура по оските на сензорот.
5. Која е обработката на MPU6050?
Ова е процесор на одборот на MPU6050 кој ги комбинира податоците што доаѓаат од акцелерометарот и жироскопот.DMP е клучот за користење на MPU6050 и подоцна е објаснет детално.Како и кај сите микропроцесори, на ДМП му треба фирмвер за да работи.
Тест за функција.Највисоките економични производи и најдобрата услуга се нашата вечна посветеност.
Hotешка статија
- Се CR2032 и CR2016 заменливи
- MOSFET: Дефиниција, принцип на работа и избор
- Инсталација и тестирање на релето, толкување на дијаграмите за реле за жици
- CR2016 наспроти CR2032 Која е разликата
- НПН против ПНП: Која е разликата?
- ESP32 VS STM32: Кој микроконтролер е подобар за вас?
- LM358 Двоен оперативен засилувач Сеопфатен водич: pinouts, дијаграми на коло, еквиваленти, корисни примери
- CR2032 VS DL2032 VS CR2025 Водич за споредба
- Разбирање на разликите ESP32 и ESP32-S3 Техничка и анализа на перформанси
- Детална анализа на колото RC серија
 Истражување на можностите и апликациите на чипот за комуникација NRF24L01
Истражување на можностите и апликациите на чипот за комуникација NRF24L01
2024-04-25
 MMBT3904 NPN Transistor: Неговите спецификации, сеопфатен водич за апликации и MMBT3904 наспроти MMBT551
MMBT3904 NPN Transistor: Неговите спецификации, сеопфатен водич за апликации и MMBT3904 наспроти MMBT551
2024-04-25
Број на топол дел
 GRM155C80J105KE15D
GRM155C80J105KE15D C0603C0G1E6R8D030BA
C0603C0G1E6R8D030BA CL32B474KBFNNNE
CL32B474KBFNNNE CGA5L3X8R1H105K160AD
CGA5L3X8R1H105K160AD 04025A4R3DA79A
04025A4R3DA79A TPSD336K016H0200
TPSD336K016H0200 TAP106K006SRW
TAP106K006SRW PIC18F66J90T-I/PT
PIC18F66J90T-I/PT LCMXO2280C-5TN144C
LCMXO2280C-5TN144C ATF16LV8C-10SI
ATF16LV8C-10SI
- MC68331CEH16
- IRU3021MCWTR
- RT0402BRE071K2L
- LT1720IMS8#PBF
- STM32L496ZGT6TR
- L6563HTR
- LM3410XSDE/NOPB
- TPIC6A259NE
- T495B106K020ZTE1K0
- TPS51225CRUKR
- FIN1048MTCX
- ISL9R1560S3ST
- LMR23630AQDDARQ1
- ACM2012-900-2P-T00
- CY7C1372DV25-167AX
- HD74HC174RPEL
- IDT7205L15J
- IP4060CX16/LF
- MAX809LD
- MB84257A-10L
- MB84VD21193EM-70
- SCC2698AC1A84
- UPD16311AGB-3BS
- UPD78F0537AGB-GAH
- WS2512-TR1G
- A277308L-70
- AK115-61
- BM29F040-90TC
- MST6M19GL-LF-S1
- MT75A-C2
- TTRN012G7
- K4T51163QE-ZCD50
- S72NS256RDOAHBGG
- LE80535VC600512-SL8FN
- XCR3064XL-6PCG44I
- ATMEG644PA-AU
- LTC6820HMS#3ZZPBF
- 26MT60
- TMUX6212PW